Метод конечных элементов - Страница 1
- 1
Дмитрий Оголихин
Метод конечных элементов в MathCad
Введение
Метод конечных элементов – один из т. н. сеточных методов. Такие методы предполагают рассмотрение цельной конструкции как совокупности отдельных конечных элементов, как показано на рисунке 1.
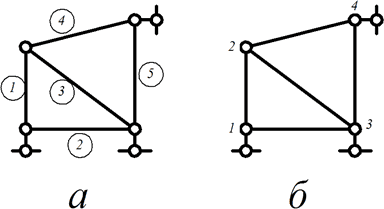
Рисунок 1. Разбиение конструкции на конечные элементы. а – нумерация конечных элементов; б – нумерация узлов.
В качестве конечных элементов выступают знакомые нам из сопротивления материалов и строительной механики стержни, балки, плиты, оболочки и т. п. По сути своей решение методом конечных элементов сводится к решению уравнения задачи в динамической постановке:
M∙d2u/dt2+C∙ du/dt+K∙u = P
где M – матрица масс конструкции;
C – матрица демпфирования конструкции;
K – матрица жёсткости конструкции;
d2u/dt2 – вектор ускорений узлов конструкции;
du/dt – вектор скоростей узлов конструкции;
u – вектор перемещений узлов конструкции;
P – вектор узловых нагрузок.
Если вектор узловых сил P не меняется во времени, то задача сводится к статической, описываемой уравнением:
K∙u = P
Так как многие задачи в машиностроении сводятся к статическим, то упор в книге будет делаться на них. Для рассмотрения задач будет использоваться среда MathCad 15.
Алгоритм МКЭ
Для того, чтобы решить уравнение необходимо провести предварительную подготовку. В общем и целом, алгоритм решения выглядит следующим образом:
1) Разбиение конструкции на конечные элементы;
2) Составление матрицы жёсткости каждого конечного элемента;
3) Перевод матрицы жёсткости из локальной системы координат в глобальную;
4) Составление глобальной матрицы жёсткости всей конструкции;
5) Приведение нагрузок к узловым;
6) Учёт закреплений;
7) Решение уравнения:
u = K-1∙P
Операция 1, на взгляд автора, интуитивно понятная и не требует пояснений.
Операции 2–6 будут подробно рассмотрены ниже.
Операция 7 будут рассмотрена подробно в примерах.
Составление матрицы жёсткости КЭ
Матрица жёсткости связывает перемещения узлов с узловыми силами, как уже говорилось в введении. Размер матрицы жёсткости N определяется количеством узлов и степенью свободы для каждого узла по формуле:
N = n∙d
где N – размер матрицы жёсткости;
n – количество узлов в элементе;
d – количество степеней свободы элемента.
Например, для стержневого (ферменного) элемента, имеющего n = 2 узла, который по определению может только растягиваться или сжиматься, количество степеней свободы d = 1. Таким образом, N = n∙d = 2∙1 = 2. Матрица жёсткости будет иметь вид:
где K – матрица жёсткости;
k11, k12, k21, k22 – элементы матрицы жёсткости.
Для конечных элементов, у которых количество степеней свободы больше единицы удобней представлять матрицу жёсткости поблочно. Например, для конечного элемента, у которого количество узлов n = 2 и количество степеней свободы d = 3матрицу жёсткости удобно представлять в виде:
где K – матрица жёсткости, размером [n×n]
k11, k12, k21, k22 – элементы матрицы жёсткости, которые из себя так же представляют матрицы размером [d×d]:
Такое представление матрицы жёсткости позволит легко и удобно получить матрицу жёсткости всей конструкции.
Матрица жёсткости, обычно, составляется в локальной системе координат этого элемента. Для перевода матрицы жёсткости в глобальную систему координат используется матрица направляющих косинусов по формуле:
Kглоб = ΛT∙K∙Λ
где Kглоб – матрица жёсткости в глобальной системе координат;
Λ – матрица направляющих косинусов.
Рассмотрим матрицы жёсткости типовых конечных элементов.
Стержневой элемент
На рисунке 2 показан стержневой конечный элемент.
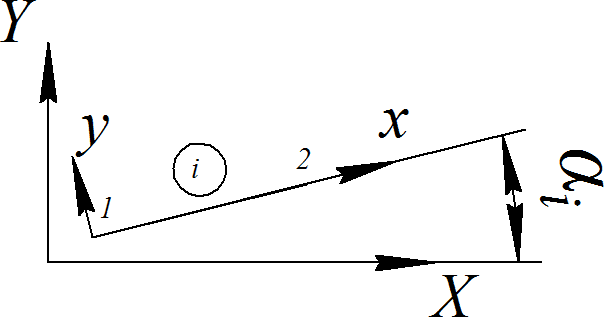
Рисунок 2. Стержневой конечный элемент
На рисунке 2 xy – локальная система координат, а XY – глобальная.
Стержневой конечный элемент имеет два узла и одну степень свободы. Матрица жёсткости в локальной системе координат вычисляется по формуле:
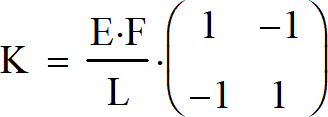
где E – модуль упругости материла;
F – площадь поперечного сечения стержня;
L– длина конечного элемента.
Матрица формы КЭ:
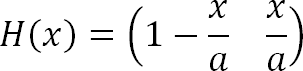
где a – длина КЭ.
Если рассматривается задача, где конструкция и нагрузки находятся в одной плоскости, то матрица направляющих косинусов определяется по формуле:

где α – угол между осями X и x (отсчитывается против часовой стрелки).
Обратите внимание, что при переходе к глобальной системе координат матрица жёсткости стержневого элемента уже будет иметь размер 4×4, так как при рассмотрении плоской конструкции каждый узел имеет по 2 степени свободы (перемещение по горизонтали и вертикали).
Конец ознакомительного фрагмента.
Текст предоставлен ООО «ЛитРес».
Прочитайте эту книгу целиком, купив полную легальную версию на ЛитРес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.