«Если», 2015 № 03 - Страница 8
Этот «изобретатель», чья дочь изображала робота новейшей системы, сделал в Германии 1910 г. хорошие сборы
Эксперименты были начаты в 1916 г., и к началу 1918-го существовала только модель — но действовала она, по мнению всех, кто наблюдал за испытаниями, очень хорошо, гораздо лучше, чем какой-либо из ранее существовавших шагоходов: достаточно сказать, что при подъеме по крутому склону «King Grey» умел наклоняться, а при спуске — откидываться назад.

Вот и «King Grey»: такой, каким он был не в мечтах конца 1916 г., а в реальности начала 1918 г.
Уже началось изготовление механизмов полноразмерного боевого «Короля» — но работа не была завершена: по-видимому, война успела закончиться раньше.
Другое дело, что сами боевые действия испытателям виделись несколько… по-австралийски. Рост шагающего тягача должен был составлять 9 футов, вес — 750 фунтов, длина шага — 42 дюйма, общая длина конструкции («от носка вынесенной вперед ноги до заднего колеса буксируемой машины») — 21 фут.
Так голландцы в 1917 году представляли себе гигантского боевого робота
В качестве буксируемого объекта — легкий бронеавтомобиль с тремя пулеметчиками и одним водителем (он и должен управлять шагоходом). Предполагалось, что отряд таких вот «Электрических титанов» способен без труда форсировать проволочные заграждения, брустверы и траншеи, а влекомые за ними броневики пулеметным огнем довершат разгром. Надо сказать — очень «сумчатое» представление о поле боя 1916-го, тем более 1918 года!
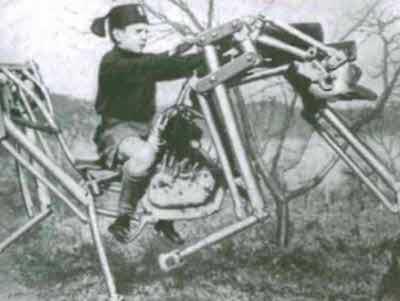
Конекузнечик-мотоциклет синьора Альцетта. Хорошо, что Муссолини так его и не получил…
Тем не менее идея боевого шагохода не исчезла даже перед Второй мировой. Кроме «андроида-буксировщика» надежда сохранялась еще и на «моторную лошадь», уже не паровую, с двигателем вполне автомобильного типа. Наиболее интересен и загадочен итальянский стальной конь «Meccanica Cavallo» всего лишь с 5-сильным мотором, в 1932–1933 гг. прошедший вроде бы успешные испытания на внедорожной местности. По утверждениям его конструктора, некого Д.-Дж. Альцетта, этот похожий на кузнечика аппарат развивал скорость лошади, идущей рысью, — но до галопа все-таки не дотягивал.
Синьор Альцетта всячески подчеркивал, насколько необходим такой «механический конь» трудолюбивому итальянскому крестьянину, но юный испытатель (видимо, Альцетта-сын) откровенно экипирован «под дуче». И вообще, муссолиниевская Италия проблемам крестьян, конечно, уделяла внимание, но не в первую очередь.

Американская полиция на каком-то этапе всерьез планировала разгонять демонстрации при помощи радиоуправляемых «робокопов»
Даже сегодня далеко не всякий внедорожник и не всякая боевая машина на таком маршруте разовьет скорость, превышающую лошадиную рысь. И появление аппаратов с такими характеристиками наверняка изменило бы многое в событиях конца 30-х — 40-х гг. — чего, как мы знаем, не произошло. Остается предположить, что изобретатель слегка преувеличил эффективность своего «Cavallo» — этак в несколько раз. Если не в десятки.
Судя по тому, что после 1933 г. о его изобретении больше никто не слышал, — так все и было.
…На этом история «докибернетических роботов» отнюдь не завершилась. Но это, как сказали бы классики, уже совсем другая история…
Александра Ольховик
КАК СПАСТИСЬ
ОТ УЖАСНЫХ РОБОТОВ?
руководство по выживанию
для человечества
/форсайт
/безопасность
/сервисные роботы
Роботы уже среди нас, и они могут быть потенциально опасны, как, впрочем, и газонокосилки, обычные, не роботизированные. Так как средний робот устроен несколько сложнее средней газонокосилки, то и спектр возможных угроз получается шире. Рассмотрим их по порядку.
1. ФИЗИЧЕСКИЙ УЩЕРБ
1.1. Случайный
Большая часть действующих роботов не предназначена для причинения вреда человеку, что совершенно не гарантирует отсутствия сбоев или ошибок в эксплуатации, ведущих к несчастным случаям. Прежде всего это касается промышленных автоматов и сложных роботизированных инструментов, управляемых человеком непосредственно. Отдельную группу риска составляют автономные транспортные средства. Например, 1 июля 2015 года в Маунтин-Вью произошло первое ДТП с участием беспилотного автомобиля, в результате которого пострадали люди. В самоуправляемый экомобиль Google сзади врезалось другое транспортное средство. Причиной аварии послужил человеческий фактор. Все участники ДТП пострадали незначительно.
Бытовые роботы пока еще не так распространены и возможностей для причинения серьезного вреда имеют меньше (пол поцарапать или кота напугать — максимум, что может учинить взбесившийся робот-пылесос, кроме того, в случае необходимости его всегда можно прибить табуреткой).
Обезопасить себя от физической робоугрозы можно несколькими способами.
РЕШЕНИЕ № 1.
Инженерно-техническое
Данный вариант предполагает работу с «железом»: усовершенствование системы датчиков, повышение точности управления, облегчение конструкции и т. д.
Интересный подход к обеспечению безопасности роботов, непосредственно взаимодействующих с людьми, предлагает компания Bionic Robotics. Вместо того чтобы полагаться на системы контроля, данная фирма проектирует роботов таким образом, что они физически не могут приложить достаточно усилий, чтобы нанести вред человеку.
Кто защитит их от нас?
Американское общество по предотвращению жестокого обращения с роботами занимается правами роботов с 1999 года. По крайней мере, так написано у них на сайте. Последние технологические разработки убедили многих, что появление полноценного искусственного интеллекта гораздо ближе, чем считалось ранее. Пока еще никто из роботов за помощью к представителям данной организации не обращался, но когда это случится, они будут готовы.
РЕШЕНИЕ № 2.
Идеологическое
Три закона робототехники Азимова продолжают вдохновлять разработчиков на попытки встроить в автономных роботов алгоритмы морали и нравственности.
В частности, созданием искусственного интеллекта, способного принимать этические решения в сложных ситуациях, занимается группа исследователей из Университета Тафтса, Университета Брауна и Политехнического института Ренсселера совместно с ВМС США.
На практике это направление пока дает больше вопросов, чем ответов. Во-первых, само определение базового перечня норм в непротиворечивой форме достаточно затруднительно. Во-вторых, действительно сложные с точки зрения этики ситуации единственно верного решения не имеют по определению. Например, как должен среагировать беспилотный автомобиль, если на дорогу выскочил ребенок и избежать столкновения можно только ценой жизни пассажира? Наконец, остается проблема ответственности за сделанный роботом выбор.